|
Willkommen,
Gast
|
|
Part-11
I assembled this NAUTILUS kit as a ‘wet-hull’ type r/c model submarine. The hull and sail are free-flooding and the only spaces aboard that are dry are those two compartments at either end of a removable cylinder. This water tight cylinder (WTC) -- also referred in Europe as a ‘module’ ... or, ‘Tupperware’ when they’re in a particularly mischievous frame of mind -- contains the three basic sub-systems needed to animate the model submarine, endowing it with the ability to cruise either on the surface or submerged. Propulsion, control, and ballast. Pushing out ballast water is done either by water pump, air-pump, piston, an onboard gas, or a combination of methods. The removable cylinder concept has been around since the 60’s and commercial product since the late 80’s. (For the Record: In the States credit for the design and continued development of the WTC is mine. In Europe I believe the lion’s share of credit for what they call a module goes to Brittan’s Nick Berge – one of the most prolific and out-of-the-box thinkers this hobby has ever had. In the days before the internet Nick and I worked toward development and promotion of similar systems, initially we were not aware of the others similar work). Typically a WTC is divided into three sections, partitioned by four bulkheads -- one at each end, and two near the center of the cylinder. Between the two internal bulkheads is formed the WTC’s ballast tank. There are variations on this theme. The work of Ron Perrott www.rcsubs.co.uk/ and Norbert Bruggen come to mind, but for brevities sake I will focus specifically on the 3” diameter, two-motor-two-shaft SAS type SD worked up for the 1/87 USS NAUTILUS kit – the subject of this rather comprehensive WIP. Most WTC’s differ as to materials and method of ballast water management. The WTC is an old idea: I have a picture of what otherwise looks to be a current version of a clear cylinder WTC from an old issue of Model Boats dated 1967. However, its cylinder was formed from Acrylic plastic – a material prone to cracking and difficult to machine. Today most clear cylinders are formed from Lexan, the same tough clear plastic used for soft-drink bottles and clear r/c car bodies.  
And here we have the WTC ‘system’ – a self-contained, removable, easily accessed water tight cylinder that contains the three sub-systems needed to effectively animate an r/c submarine: propulsion, control, and water ballast. Atop is an assembled, outfitted, tested, and operational SubDriver (the proprietary name given our extensive line of WTC’s). These two sized and arranged specifically for the 1/87 scale USS NAUTILUS. Pictured are the significant components that go into the manufacture of this SubDriver (SD). Four cast resin bulkheads divide the Lexan cylinder into three sections. The after dry section contains the propulsion and control elements; the center section forms the ballast tank; and the forward dry space houses the battery and mission switch.  
Examine the above cut-away examples of a typical WTC bulkhead and pushrod watertight seal to get an idea how the conduit, bulkhead, and pushrods are made watertight to the SD. All four resin bulkheads are made watertight to the cylinder through edge sealing O-rings. The conduit -- a brass tube that running the length of the ballast tank -- is made watertight to the ballast bulkheads via partially encapsulated O-rings during bulkhead manufacture. The pushrod watertight seals are descrete items that are RTV’ed into holes punched through the motor and after ballast bulkheads. Each pushrod seal features a 1/16” diameter bore with an encasulated O-ring at the seal bodies center which effects the watertight seal between its axial running pushrod and SD proper. The three pushrods that project aft make up to the stern plane, rudder, and bow plane linkages – all of which are external of the SD and make up with magnetic connectors. A single pushrod passes between the dry and wet side of the after ballast bulkhead and is part of the linkage that controls the operation of the ballast tank vent and emergency gas blow valve.  
Three servos are mounted on the motor-bulkhead device tray. The one about to be made up to its 1/16” diameter brass pushrod drives the stern planes. This servo is tended by the ADF2 angle-keeper circuit (with operator input always available); the middle servo is for the rudders; and the port servo operates the bow planes. Each servo pushrod goes through a watertight seal set into the motor-bulkhead. Those seal bodies made fast with RTV adhesive – this permits easy replacement if called for.  
Like cramming ten-pounds of stuff into a five-pound bag! That’s always been the situation with r/c model submarines. As illustrated here. All the devices that have to fit, coherently, onto the motor-bulkhead device tray and bulkhead can now be fit into a very tight package. Only with the development of small footprint devices (computer assisted circuit design and surface mount technology) and very selective receivers (signal processing in addition to detection) has this magic-trick been possible. Device size and receiver selectivity has been a boon to this hobby. Pull the motor-bulkhead away from the cylinder and there are only two electrical connections to break to free the entire unit from the system: one pair of plug connectors interface the motor-bulkhead to the battery power cable, and the lead going to the ballast servo mounted to the dry-side of the after ballast bulkhead. In order to better describe the function and arrangement of three sub-systems, I’ll discuss each in some detail with supporting pictures: PROPULSION SUB-SYSTEM The devices regarded as belonging to the propulsion sub-system include the battery, Electronic Speed Controller (ESC), mission switch, battery cable, battery, cable plugs, motors, motor spark- suppression, gear reduction and propulsion shaft seals. 
BATTERY This particular SD is sized to fit the 1/87 USS NAUTILUS kit. As I found the size of the ballast tank left little room for both the forward and after dry spaces, this necessitated the use of ‘short’ 11.1-volt Lithium-polymer batteries. Two of these short batteries, wired in parallel, achieved the 3-Ampere hour capacity needed to keep the model running for a few hours between charges. Note the use of a three-plug adapter used to gang the two batteries together in parallel, permitting me to retain the original battery discharge plugs. One of these ganged batteries made up to the foreground  motor-bulkhead devices through a test/set-up power cable – this cable making set-up of the installed devices an easy matter, and is a perfect analog to the one that runs through the SD’s conduit tube. ESC The electronic speed controller is a common, commercially available item that directs battery current of the desired polarity and intensity to the motor(s) as commanded by the transmitters throttle stick. I’m a big fan of the Mtroniks brand of brushed motor ESC’s. These units are waterproof, robust, and easy to program, and feature a relatively small footprint for the work they do. It’s a good practice to select an ESC with a maximum sustained current draw that approximates 2X the stall current of the motor(s) it’s connected to. For this application, where I’m driving two motors in parallel, I’ve found the fifteen-Ampere Mtroniks ESC to be more than adequate to the task. Though provided, you do not use the ESC’s battery eliminator circuit on the larger SD’s – it simply does not have the current capacity to meet the load presented to the receiver power bus. Either snip off or pull clear of the ESC’s lead the red wire to disable the ESC’s BEC .... NOT THE BLUE WIRE, OR WE ALL DIE IN A HORRIBLE EXPLOSION (for you WW-2 movie fans out there).  
 
MISSION SWITCH The entire system is powered through a single battery – which provides power to control, propel manage ballast water. The mission switch is a simple, series connected single-pole, single-throw toggle-switch rated for 10-Amper’s at 110- volts. The on/off function is done at the forward face (wet side) of the SD’s forward bulkhead – simply flipping the toggle to either the ‘on’ or ‘off’ position. The switch itself is made waterproof by a rubber boot that fits over the toggle and makes a watertight union to the face of the bulkhead through an O-ring. The mission switch is wired in series to the battery power cable – the wiring passing through a strain-relief block within the forward bulkhead, its job to prevent breakage of the wires at the switch terminals during handling. BATTERY POWER CABLE To be capable of handling up to a sustained 20-Ampere’s at 12-volts it’s two conductors are of 16-gauge; enough copper cross section to preclude any significant voltage drop or heating. This is the main-line between the battery and all the devices requiring electrical power in the after dry space. The power cable runs aft through the brass tube conduit within the central ballast tank. A male Deans-plug at the forward end makes up to the battery (parallel battery harness in this case), and a female Deans plug at the after end of the cable makes up to the devices female Deans plug off to the side of the motor-bulkhead device tray, within the SD’s after dry space. As pictured below. 
CABLE PLUGS As mentioned, the power cable plugs are of the Deans type. These are polarized to prevent accidental polarity screw-ups when making up the battery and devices to the power cable. Though four devices get battery power direct (BEC, MPC, BLM and ESC), it’s the ESC we’re interested in here. This vital propulsion device gets the lion’s share of current when the propulsion motors are running and accounts for why the power cable and connecting plugs, and mission switch are of such a robust nature. 
MOTOR AND SPARK SUPRESSION Two 40 turn, three-pole, 12-volt, brushed, 380 sized motors are mounted within the dry side of the motor-bulkhead. Each motor is spark- suppressed with two .01 micro-Farad capacitor – each soldered to the motor case and one brush pole. These capacitors store and discharge at a low RF frequency the ‘electrical noise’ created by the arcing between brushes and commutator pads. Noise that if it got into the very tightly package array of electronic devices would drive them nuts! The two motors are wired to a single ESC in parallel, is such a way that each shaft turns counter to the other. 
GEAR REDUCTION To better speed-match the high RPM motors to the low RPM propellers I usually employ a 3:1 gear reduction as pictured above. The typical motor bulkhead comprises two pieces: a forward back-plate to hold the motors with their press fit pinion gears; and the motor-bulkhead proper in which are housed the drive- shafts, spur gears, and drive-shaft cup type watertight seals. The motor-bulkhead also mounts the servo pushrod seals, receiver antenna extension, and SAS suction and discharge nipples. Screwed to the forward face of the motor-bulkhead back-plate is the aluminum tray and bulkhead, upon which all the devices are either screwed or double- back taped in place. The motor bulkhead is HEAVILY populated with stuff! 

SHAFT SEALS Each 3/16” diameter motor drive shaft is made watertight to the motor- bulkhead through a cup-seal. A cup-seal is housed within a plastic shaft seal body and the seal backed up against transverse motion by an internal Oilite bearing. Cup type seals are ideal for rotating shafts as they offer minimal friction and have the feature of increasing their sealing pressure with increasing outside water pressure. Each shaft seal unit is affixed within the motor-bulkhead with RTV adhesive – this flexible material easily absorbs vibration and can be easily defeated if the occasion arises where the shaft seal either needs replacement or repair. CONTROL SUB-SYSTEM The control sub-system constitutes the ‘brains’ of the SD system; devices that take the commands that originate in your massive brain, into the transmitter, then on to the receiver where that intelligence (or an autonomously functioning environment sensing device) emerges as modulated pulse-width. Each channel from the receiver feeds a device or devices with a command from the transmitter. Then, each device either converts that intelligence into physical motion (servos), applies a voltage to a motor or solenoid (ESC and MPC), or generates a pre-set pulse-width data stream to drive other devices to a pre-set ‘fail-safe’ position (Lipo- Guard, BLM, or ADF2). 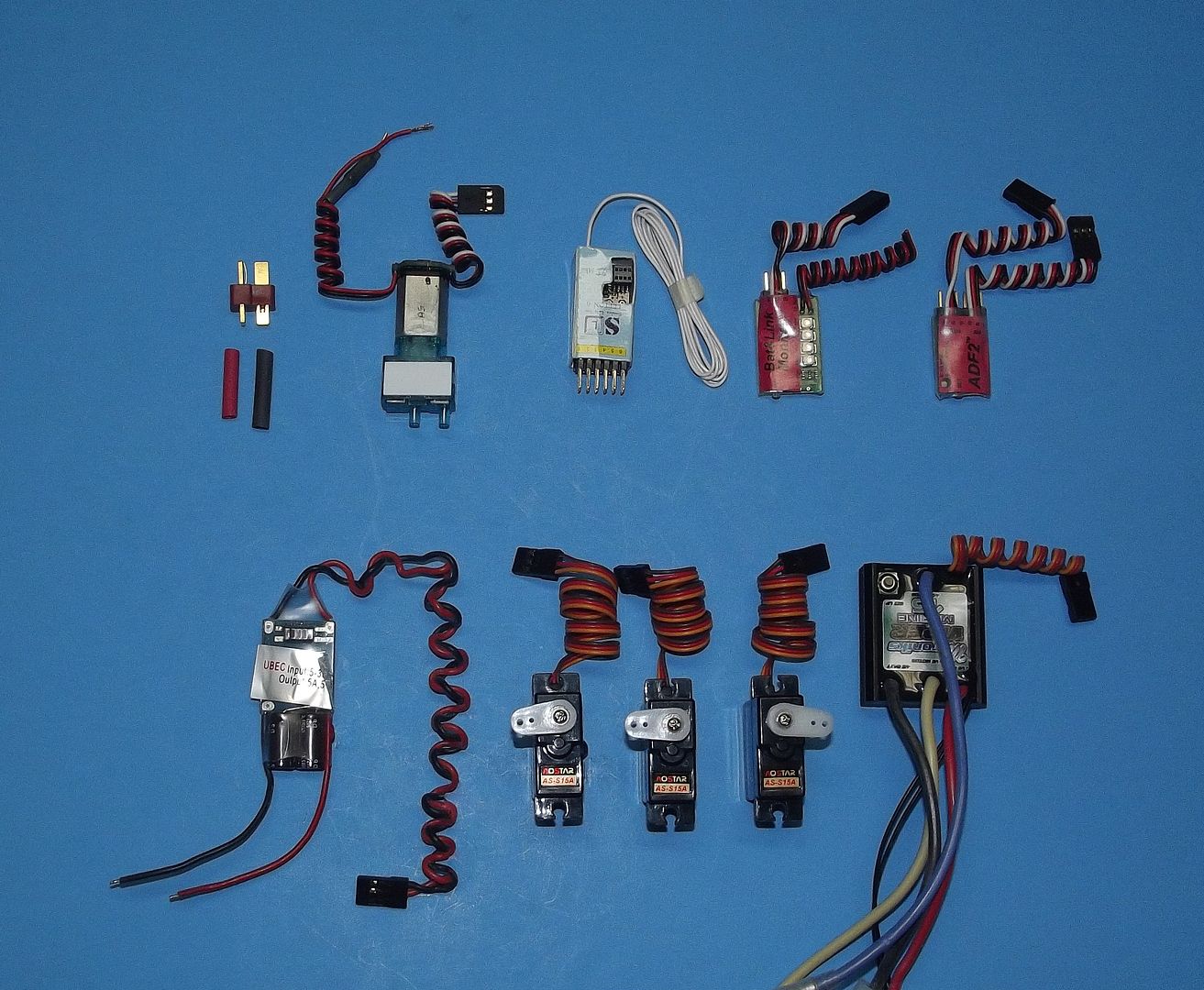
Most of the devices are common to the average r/c model vehicle user. The servos, ESC, BEC, transmitter-receiver, battery, and connectors can be found at any hobby shop or through the Internet. However, r/c model submarining places demands on the system, and employs special devices that are only available from a few dedicated on-line services, Such as the Caswell Company – the outfit I work for. Their catalog can be seen here: sub-driver.com/ This outfit also supplies a wide range of SD’s for the r/c submarine modeling community. 
The above photo shows a typical hook-up arrangement of the devices that control, propel, and manage the ballast water aboard a SubDriver type WTC. And this is not all of it, just the devices that mount to the motor tray and bulkhead. If you look carefully you’ll see that four of these devices (ESC, BLM, MPC, and BEC) have their own red-black power wires. These red-black wires will all be ganged together in parallel and made up to a Deans male type plug which will make up to the battery cable. 
BATTERY ELEMINATOR CIRCUIT Not actually a controlling device, but vital to the whole sub-system, is the BEC, the battery eliminator circuit. This devices takes the high-voltage battery current, reduces it to the 5-volts the other devices require (distributed through the receiver bus via each devices three-wire lead). But, unlike the low capacity ESC BEC’s, this dedicated BEC has the ass to pump out a continuous 8-Ampere’s of current (enough to smoke the receiver bus foils if ever attained ... but that’s another issue!). The stand-alone BEC in larger models (such as the case here) is used because of the higher stall current situations larger servos can present. The BEC is the circuit power source for all devices and as such is a vital element of the control sub-system. Smaller systems, using smaller servos, can get away with using the dinky ESC BEC. BATTERY LINK MONITOR/LIPO-GUARD If your system employs Lithium batteries you must have on board either the old Lipo-Guard or the recently introduced (and much more capable) battery link monitor (BLM). Both devices monitor battery voltage and work to prevent a low voltage to damage the battery. When activated, the device locks you out of the ballast channel loop, so that the model must be returned to shore for re- set – by that time even the most dense r/c submarine driver will have figured out that his battery needs replacement/re-charging. The difference between the Lipo-Gurad and BLM is the added capability of the BLM. The BLM not only protects the battery but also serves as a loss-of-signal fail-safe; real-time battery voltage meter; and r/c system performance monitor -- actually counts and displays the number of frame drop-outs that have occurred since last switching on the system. 
ADF2 The ADF2 is two devices in one: An angle-keeper and a fail-safe circuit. The angle- keeper plugs into channel-5 of the receiver. The circuit employs a position sensor (accelerometer) to detect and work out the displacement of the gravity line (established during device set-up/programming) to the model submarines axis. And that is what you see in the above hook-up between the ADF2, stern plane servo, and receiver. The angle- keeper is both an autonomous artificial stabilization device – working the stern planes to keep the boat at a near a zero pitch-angle while underway submerged -- yet able to permit operator input to the stern planes; mixing both driver and angle-keeper inputs into a viable command output to the servo. The fail-safe side of the ADF2, if used, plugs into either the Lipo-Guard or channel-4 receiver port. In this example the ADF2 fail-safe circuit is not used – its lead not used. RECEIVER The r/c system receiver is the RF link between your transmitter and the devices that control, manage ballast water, and propel the r/c model submarine. Today’s receivers are so well designed and crafted that they have the signal selectivity to work in the very tight confines of a very RF noisy environment (The closer the receiver is to all those motors and signal-generators the more hideous becomes the inverse-square rule). Bottom line: we can cram the SD with so much stuff today and not have to worry excessively about the receiver being swamped and made stupid by all the electrical noise. At a minimum you want a five-channel receiver on any RF band below 75mHz if you want the ability to sail the model underwater with the antenna completely submerged (and then, only in fresh water). 2.4gHz r/c systems just won’t work with the receiver antenna under water. 
MOTOR PUMP CONTROLLER The MPC is an electronic switch that solders directly to the back-plate of the small brushed motor that drives the low pressure blower (LPB), which produces the compressed air used to blow the ballast tank dry. The above photo demonstrates the low foot-print of the MPC. The larger unit above is used in my line of larger SD’s. The MPC gets its power from the battery cable through a voltage-dropping resister that permits the LPB motor to operate at its optimum 3-6 volts, not the 11.1- volts that comes directly off the battery. The MPC’s three-wire lead makes up to one leg of the Y-lead that comes out of the ADF2 fail-safe side or output side of the battery link monitor (BLM) – that signal shared with the ballast sub-system servo. 
BALLAST SUB-SYSTEM Models that don’t employ a variable ballast (ballast tank) can only dive dynamically – they require forward motion to generate the dynamic force on the hull to drive the submarine beneath the surface. Submarines that can dive in place, without the need of hull produced dynamic force, do so by changing their weight; increasing it so that the added displacement caused by the above waterline structures being immersed is countered by the weight of the water taken into the ballast tank. The ballast sub-system comprises the ballast tank and the means of flooding it with water and pushing all the water out as either commanded from the transmitter or automatically through one of the detected fail-safe conditions: loss of r/c system signal or low battery voltage. Either the normal SAS type vent/blow cycle or a back-up emergency gas ballast blow will empty the tank. SAS normally. Gas and SAS when commanded by the fail-safe circuit. The ballast sub- system servo and its linkage are common to both the SAS and gas elements of the sub-system. Moderated travel of the linkage produces a SAS type blow. Extreme movement of the linkage results in both a SAS and gas type blow.
All our static diving type SD’s use the ‘soft’ type ballast tank – the tank is open at its bottom permitting the free flow of water in or out of it. If the vent valve is closed and air is in the tank, then it will compress to the ambient water pressure (usually, on the surface); opening the vent valve permits a pressure drop within the tank and water quickly floods in, displacing the water. The normal means of discharging the water is to compress air from either the dry-spaces of the cylinder or atmosphere and discharge that air into the ballast tank, forcing the water out as the higher air pressure displaces the water. Blowing air is selected in the Semi ASpirated (SAS) elements of the ballast sub-system by the snorkel mechanism. 
[IMG]http://i262.photobucket.com/albums/ii116/dmeriman/PART- 11/DSCF0206.jpg[/img] SERVO The ballast sub-system servo drives a pushrod that runs through a watertight seal set within the after ballast bulkhead. The wet side of that bulkhead (within the ballast tank) has the linkage that translates the linear travel of the pushrod to a vertical motion which works to open/shut the vent valve atop the cylinder. Extreme motion of the servo in the ‘blow’ position not only keeps the vent valve shut it also causes the ballast linkage arm to open the emergency gas blow valve – the extreme motion can only be achieved through the fail-safe circuit or engagement of the transmitters channel-4 trim lever to the extreme ‘blow’ position. 
MPC As mentioned, the motor pump controller is a form-fitting electronic switch that solders directly to the back of the low pressure blower motor. It is one of the four devices that takes battery current directly, and sends it to the motor as directed by the command that comes through the battery link monitor (as commanded by the transmitter or fail-safe circuit built within the BLM). Both the ballast sub-system servo and MPC get their control inputs through a Y-lead from the BLM, so they work in unison. (The above illustration shows both the small and larger type MPC’s we use with our line of SD’s – the USS NAUTILUS SD makes use of the smaller LPB-MPC unit). 


LPB The low pressure blower is a positive displacement pump with the ability to pass a non-compressible fluid, like water, without damage. It is (the smaller unit) a two-stage diaphragm type – and it’s the flexibility of the diaphragm that permits it to pass water without getting hammered. A non-reversible type pump, it can only pass the air in one direction. And in this application the air is always directed into the ballast tank. That air pushing out the water within -- emptying the ballast tank. The air either comes from within the SD dry spaces or from atmosphere through an induction snorkel mechanism set up high within the sail, usually. Up high, the snorkel will broach the surface as the boat ascends. The above SAS layout illustrates both function and the devices used to draw air from either the cylinder or atmosphere and push it into the ballast tank. BLM The battery link monitor is an upgrade from the Lipo-Guard. Unlike the Lipo- Guard -- which only monitored battery voltage and simulated a ‘loss of signal’ condition to activate the ADF’s fail-safe circuit – the BLM produces a ‘blow’ signal when the battery voltage drops below the critical level. Also, the BLM is suitable for a number of different battery chemistries and cell counts; can be set for specific servo travel; as well as time delay between activation and ‘blow’ command. A very useful device regardless of battery type, but a must if you employ a battery of Lithium chemistry. David |
|
Bitte Anmelden um der Konversation beizutreten. |

![[IMG]http://i262.photobucket.com/albums/ii116/dmeriman/PART- 11/DSCF0206.jpg[/img]](http://s262.photobucket.com/user/dmeriman/media/PART-%2011/DSCF0206.jpg.html){kind=link}